Optic Flow
Home
About Us
People
Teaching
Research
Publications
Awards
Links
Contact
Internal
Correspondence problems are one of the key problems in computer vision.
They appear for example in motion analysis, image matching, or stereo vision.
The goal is to assign structures in one image to structures in a second image,
in a way that corresponding structures are as similar as possible. In the
case of motion analysis, for instance, this means that pixels are tracked in
a sequence by finding the shift vector for each pixel from one image to the
next. For this, some property of the pixels has to be assumed to stay constant
over time.
Correspondence problems are in general ill-posed, as everybody can imagine
there are several possibilities to match structures. To deal with this problem
additional smoothness assumptions have to be applied, which can considerably
affect the outcome.
 |
 |
 |
 |
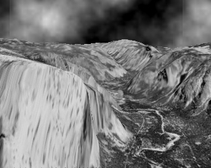
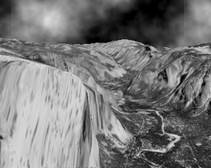
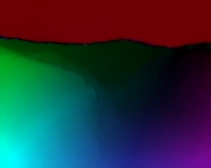
This figure shows two frames of the famous Yosemite test sequence and the shift
vectors computed by one of our algorithms. Here the shift vectors are shown
in a coloured orientation plot where the colour represents the orientation of
the vector and brightness stands for its magnitude.
In our group, we focus mainly on motion analysis, in particular on variational approaches and their numerical realisation. But we also look into the very related areas of image matching and stereo vision.
Smoothness Assumptions for Variational Optic Flow Estimation
During the years, a large amount of different smoothness assumptions have
been proposed in the literature. This goes from homogeneous, over image-driven
to flow-driven smoothness terms, which can again be both isotropic or
anisotropic. A classification of all these techniques helps to understand
similarities and differences of methods much better [1].
Combination of Local and Global Methods
There are two different ways to motion estimation. In local methods the
optic flow within a neighbourhood is assumed to be smooth and the flow is
computed also respecting only this neighbourhood. In global methods, on the
other hand, a global energy functional is minimised that respects all the
given data to determine the resulting flow field. Both approaches have their
advantages and drawbacks. We succeeded in combining both strategies, what
allows to take over the best properties from both worlds. So we are able to
ensure dense flow fields which are still robust under noise [2,3].
Optic Flow Estimation with the Nonlinear Structure Tensor
Local methods are often based on the so-called structure tensor. This
structure tensor is obtained by smoothing the outer product of the image
gradient with a Gaussian kernel. Instead we apply nonlinear diffusion for the
smoothing, therefore using the nonlinear structure tensor.
This leads to a higher accuracy in the estimation [4].
Higher Order Optic Flow Constraints
Real world image sequences often suffer under slight brightness changes.
Applying the standard optic flow constraint, which assumes the
grey value of corresponding pixels to stay constant from one image to the
next, is not a good way to go. This is because due to the bringhtness change,
the basic assumption of this constraint is not valid anymore. Therefore,
we apply measures that are less dependent on brightness, such as the image
gradient or the Laplacian [5].
Theory for Warping
Warping has become a very popular strategy for optic flow estimation in the
presence of large displacements. So far warping has only algorithmically been
motivated. We found out, that warping can also be seen as a numerical scheme
which solve the original non-linearised constancy assumption, instead of the
widely used linearised term. The consequent implementation of this scheme
leads to very accurate results like those shown in the images above
[6].
Fast Numerical Algorithms
Variational approaches yield large linear systems, which results in long
computation times, if implemented in a naive way. In our group we developed
many techniques that speed up the computation considerably. See also
our research page on scientific computing.
-
J. Weickert, C. Schnörr:
A theoretical framework for convex regularizers in PDE-based computation of image motion.
International Journal of Computer Vision, Vol. 45, No. 3, 245-264, December 2001.
Revised version of Technical Report No. 13/2000, Computer Science Series, University of Mannheim, Germany, June 2000. -
A. Bruhn, J. Weickert, C. Schnörr:
Lucas/Kanade meets Horn/Schunck: Combining local and global optic flow methods.
International Journal of Computer Vision, in press.
Revised version of Technical Report No. 82, Department of Mathematics, Saarland University, Saarbrücken, Germany, April 2003.
-
A. Bruhn, J. Weickert, C. Schnörr:
Combining the advantages of local and global optic flow methods.
In L. Van Gool (Ed.): Pattern Recognition. Lecture Notes in Computer Science, Vol. 2449, Springer, Berlin, 454-462, 2002. -
T. Brox, J. Weickert:
Nonlinear matrix diffusion for optic flow estimation,
In L. Van Gool (Ed.): Pattern Recognition. Lecture Notes in Computer Science, Vol. 2449, Springer, Berlin, 446-453, 2002. -
J. Weickert, A. Bruhn, N. Papenberg, T. Brox:
Variational Optic Flow Computation: From Continuous Models to Algorithms.
In L. Alvarez (Ed.): IWCVIA '03: International Workshop on Computer Vision and Image Analysis, Universidad de Las Palmas de Gran Canaria, Dec. 4-6, 2003.
-
T. Brox, A. Bruhn, N. Papenberg, J. Weickert:
High accuracy optical flow estimation based on a theory for warping.
In T. Pajdla, J. Matas (Eds.): Computer Vision - ECCV 2004. Lecture Notes in Computer Science, Vol.3024, Springer, Berlin, 25-36, 2004.
MIA Group
©2001-2005
The author is not
responsible for
the content of
external pages.